派克轉換(也譯作帕克轉換,英語:Park's Transformation),是目前分析同步電動機執行最常用的一種坐標轉換,由美國工程師派克(R.H.Park)在1929年提出。派克轉換將定子的a,b,c三相電流投影到隨着轉子旋轉的直軸(d軸),交軸(q軸)與垂直於dq平面的零軸(0軸)上去,從而實現了對定子電感矩陣的對角化,對同步電動機的執行分析起到了簡化作用。
派克正轉換:
![{\displaystyle {\mathbf {i} }_{dq0}={\mathbf {P} }{\mathbf {i} }_{abc}={\frac {2}{3}}\left[{\begin{array}{*{20}c}{\cos \theta }&{\cos \left({\theta -120^{\circ }}\right)}&{\cos \left({\theta +120^{\circ }}\right)}\\{-\sin \theta }&{-\sin \left({\theta -120^{\circ }}\right)}&{-\sin \left({\theta +120^{\circ }}\right)}\\{\frac {1}{2}}&{\frac {1}{2}}&{\frac {1}{2}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{i_{a}}\\{i_{b}}\\{i_{c}}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dc514e784707d7fedc95069476f8c414847ed625)
逆轉換:
![{\displaystyle {\mathbf {i} }_{abc}={\mathbf {P} }^{-1}{\mathbf {i} }_{dq0}=\left[{\begin{array}{*{20}c}{\cos \theta }&{-\sin \theta }&1\\{\cos \left({\theta -120^{\circ }}\right)}&{-\sin \left({\theta -120^{\circ }}\right)}&1\\{\cos \left({\theta +120^{\circ }}\right)}&{-\sin \left({\theta +120^{\circ }}\right)}&1\\\end{array}}\right]\left[{\begin{array}{*{20}c}{i_{d}}\\{i_{q}}\\{i_{0}}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5bd8540eabdce71a6e8c75e591af178d463607aa)
派克轉換也作用在定子電壓與定子繞組磁鏈上:
 ,
,
幾何解釋[編輯]
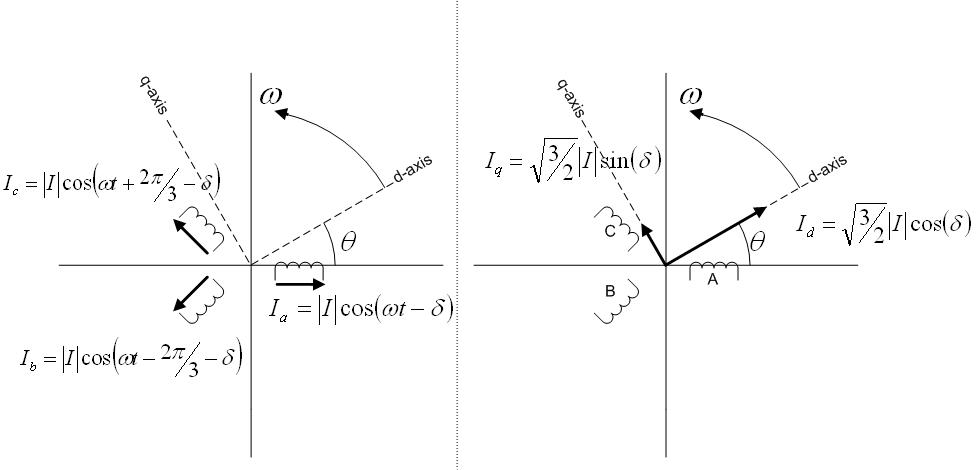 上圖描繪了派克轉換的幾何意義,定子三相電流互成120度角,
上圖描繪了派克轉換的幾何意義,定子三相電流互成120度角, 為定子電流落後於它們對應的相電壓的角度。直軸與交軸電流分別等於定子三相電流在d軸與q軸上的投影。(圖中的比例系數
為定子電流落後於它們對應的相電壓的角度。直軸與交軸電流分別等於定子三相電流在d軸與q軸上的投影。(圖中的比例系數 是由於圖中所採用的是正交形式的派克轉換)d-q坐標系在空間中以角速度
是由於圖中所採用的是正交形式的派克轉換)d-q坐標系在空間中以角速度 逆時針旋轉,故
逆時針旋轉,故  以d軸領先a相軸線的方向為正。當定子電流為三相對稱的正弦交流電時,
以d軸領先a相軸線的方向為正。當定子電流為三相對稱的正弦交流電時, ,
, 為直流電流,
為直流電流, 。
。
用派克轉換化簡同步發電機基本方程[編輯]
轉換後的磁鏈方程[編輯]
磁鏈方程:
![{\displaystyle \left[{\begin{array}{*{20}c}{{\mathbf {\Psi } }_{abc}}\\{{\mathbf {\Psi } }_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf {L} }_{SS}}&{{\mathbf {L} }_{SR}}\\{{\mathbf {L} }_{RS}}&{{\mathbf {L} }_{RR}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf {i} }_{abc}}\\{{\mathbf {i} }_{fDQ}}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3082ab58d5960db03ce9a599186fed5fdb8b9d6)
上式中的電感系數矩陣  事實上都含有隨時間變化的角度參數[1],使得方程求解困難。
事實上都含有隨時間變化的角度參數[1],使得方程求解困難。
現對等式兩邊同時左乘 ![{\displaystyle \left[{\begin{array}{*{20}c}{\mathbf {P} }&{}\\{}&{\mathbf {U} }\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/785567a696d2db290ee5f39485537c63f61b9f42) ,其中
,其中 為三階單位矩陣。方程化為:
為三階單位矩陣。方程化為:
![{\displaystyle \left[{\begin{array}{*{20}c}{{\mathbf {\Psi } }_{dq0}}\\{{\mathbf {\Psi } }_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{\mathbf {P} }&{}\\{}&{\mathbf {U} }\\\end{array}}\right]\left[{\begin{array}{*{20}c}{{\mathbf {L} }_{SS}}&{{\mathbf {L} }_{SR}}\\{{\mathbf {L} }_{RS}}&{{\mathbf {L} }_{RR}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{{\mathbf {P} }^{-1}}&{}\\{}&{\mathbf {U} }\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf {i} }_{abc}}\\{{\mathbf {i} }_{fDQ}}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5d9b4e3ae27b9ae490ae4f54cf60f428586129e6)
![{\displaystyle \left[{\begin{array}{*{20}c}{{\mathbf {\Psi } }_{dq0}}\\{{\mathbf {\Psi } }_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf {PL} }_{SS}{\mathbf {P} }^{-1}}&{{\mathbf {PL} }_{SR}}\\{{\mathbf {L} }_{RS}{\mathbf {P} }^{-1}}&{{\mathbf {L} }_{RR}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf {i} }_{dq0}}\\{{\mathbf {i} }_{fDQ}}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e199174f7ee7601d08f8cf72dd7d401960aec01c)
其中 ![{\displaystyle {\mathbf {PL} }_{SS}{\mathbf {P} }^{-1}=\left[{\begin{array}{*{20}c}{L_{d}}&{}&{}\\{}&{L_{q}}&{}\\{}&{}&{L_{0}}\\\end{array}}\right]\triangleq {\mathbf {L} }_{dq0}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3730aebc2532eb3281dcf11db288d2bba7f078d8) 。
。
① 轉換後的電感系數都變為常數,可以假想dd繞組,qq繞組是固定在轉子上的,相對轉子靜止。
② 派克轉換陣對定子自感矩陣  起到了對角化的作用,並消去了其中的角度變數。
起到了對角化的作用,並消去了其中的角度變數。 為其特徵根。
為其特徵根。
③ 轉換後定子和轉子間的互感系數不對稱,這是由於派克轉換的矩陣不是正交矩陣。
④  為直軸同步電感系數,其值相當於當勵磁繞組開路,定子合成磁勢產生單純直軸磁場時,任意一相定子繞組的自感系數。
為直軸同步電感系數,其值相當於當勵磁繞組開路,定子合成磁勢產生單純直軸磁場時,任意一相定子繞組的自感系數。
轉換後的電壓方程[編輯]
電壓方程:
![{\displaystyle \left[{\begin{array}{*{20}c}{{\mathbf {U} }_{abc}}\\{{\mathbf {U} }_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf {r} }_{S}}&{}\\{}&{{\mathbf {r} }_{R}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf {i} }_{abc}}\\{{\mathbf {i} }_{fDQ}}\\\end{array}}\right]+\left[{\begin{array}{*{20}c}{{\mathbf {\dot {\Psi }} }_{abc}}\\{{\mathbf {\dot {\Psi }} }_{fDQ}}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/994e7b049c1e4454e7f6e21b13cd239e984a31e3)
現對等式兩邊同時左乘 ,其中為三階單位矩陣。方程化為:
![{\displaystyle \left[{\begin{array}{*{20}c}{{\mathbf {U} }_{dq0}}\\{{\mathbf {U} }_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf {r} }_{S}}&{}\\{}&{{\mathbf {r} }_{R}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf {i} }_{dq0}}\\{{\mathbf {i} }_{fDQ}}\\\end{array}}\right]+\left[{\begin{array}{*{20}c}{{\mathbf {P{\dot {\Psi }}} }_{abc}}\\{{\mathbf {\dot {\Psi }} }_{fDQ}}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51c8f36019019e52cd5b727ccf24a328625a14ba)
由  ,
,
對兩邊求導,得  ,
,
所以 
其中 ![{\displaystyle {\mathbf {{\dot {P}}P} }^{-1}=\left[{\begin{array}{*{20}c}{}&\omega &{}\\{-\omega }&{}&{}\\{}&{}&{}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/df48a8dea9e5c150f0632f1adf2435e9ed05fe7c) ,令
,令 ![{\displaystyle {\mathbf {S} }={\mathbf {{\dot {P}}P} }^{-1}{\mathbf {\Psi } }_{dq0}=\left[{\begin{array}{*{20}c}{}&\omega &{}\\{-\omega }&{}&{}\\{}&{}&{}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{\Phi _{d}}\\{\Phi _{q}}\\{\Phi _{0}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{\omega \Psi _{q}}\\{-\omega \Psi _{d}}\\{}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e22eb3a6bd887c24b4b7b4f299e1d21e4b677142)
於是有 ![{\displaystyle \left[{\begin{array}{*{20}c}{{\mathbf {U} }_{dq0}}\\{{\mathbf {U} }_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf {r} }_{S}}&{}\\{}&{{\mathbf {r} }_{R}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf {i} }_{dq0}}\\{{\mathbf {i} }_{fDQ}}\\\end{array}}\right]+\left[{\begin{array}{*{20}c}{{\mathbf {\dot {\Psi }} }_{dq0}}\\{{\mathbf {\dot {\Psi }} }_{fDQ}}\\\end{array}}\right]-\left[{\begin{array}{*{20}c}{\mathbf {S} }\\{}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b0394d9f1151d6642ffd49eb58ce919919c5dbd2)
上式右邊第一項為繞組電阻的壓降,第二項為變壓器電勢,第三項為發電機電勢或旋轉電勢。
- ^ 定子電感矩陣
![{\displaystyle {\mathbf {L} }_{SS}=\left[{\begin{array}{*{20}c}{L_{aa}}&{M_{ab}}&{M_{ac}}\\{M_{ba}}&{L_{bb}}&{M_{bc}}\\{M_{ca}}&{M_{cb}}&{L_{cc}}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/296417413ce77debba665c492629a0d65f8591d8) ,
,
其中






參考書目[編輯]
